Our task in this field activity was to create a geodatabase in ArcCatalog which we would use in the coming weeks to collect data and ultimately create a microclimate map. Developing and creating a geodatabase may sound like a simple task however it is of great importance to make it correctly. Using ArcCatalog makes the process of creating a geodatabase easy but setting it up properly for data collection is a whole other task in and of itself. In this exercise we worked on pre-planning for a future field activity where we would be using our geodatabase in the field for data collection. This report is divided into two parts: part one focuses on the importance of having the properly set up geodatabase and part two will act as a tutorial on how to the microclimate geodatabase was actually created.
Methods
Part 1:
It is crucial when conducting field work to be well prepared. In order to properly utilize tools like ArcPad we can install a geodatabase to collect data. Geodatabases can be used to manage and store data when using ArcGIS. Data can then be easily accessed and is a way to organize GIS data. When working toward planning for field work by creating a geodatabase the biggest aspect to consider is the domain. A domain is a range or group of valid attribute values that can be used in order to record features collected in the field. These geodatabases are important because they can ensure that the entry of the data is accurate and also consistent. Single domains can be used for many feature classes within a single geodatabase since the domain is merely a property of the greater geodatabase which can be set.
There are a number of different domain field types which can be set including: short and long integer, float, double, text and date. These can be used to better classify the data values in order to maintain consistency of the data while in the field. An example of this can be found in our future project. Say that someone wishes to collect land cover type at various points in their study area. The would set their domain as text with predefined values such as snow, grass, gravel, concrete and other. By setting the possible values of the domain it will not only speed up the process of data entry in the field but also serve as a way to standardize data and minimize possible error. It is also important to set ranges for data like temperature to prevent any accidental errors like inputting 200 degrees fahrenheit when you meant to put 20. Setting a reasonable range of 0 to 100 degrees it will help to avoid numerical errors as well. By completing all of this work prior to field work it will save time and frustration of needing to correct for errors later.
Part 2
The process of creating the microclimate map which we will be developing in the coming weeks involves various stages which can be seen below.
Geodatabase Pre-Planning
It's important when creating a geodatabase to take into consideration before you start making it what the purpose of it is. For instance, in this lab we are working to create a geodatabase to organize microclimate data. Microclimate is basically the climate of a small area that is different than other parts of the surrounding environment. An example of this could be that an area blocked by wind such as the courtyard in Phillips hall or behind another building on campus might be warmer than open areas like the campus mall not that much further away. Microclimates don't have to be limited to a small size though, they can also be large like the comparison of climate in a downtown, urban area compared to a surrounding rural land.
It's important to determine what information we will need to collect for this map which will ultimately act as a way to visualize microclimates to the viewer. Some data that would be valuable to this study includes: temperature (both at the surface and at eye level), dew point, wind chill, ground cover, wind speed, direction of wind etc. All of these need to be included in plans for our geodatabase for this map.
Creating the Geodatabase
The next step is to actually create the geodatabase itself. The best way to do this is to start by opening ArcCatalog. Then choose a folder in which you want your geodatabase to be created in and right click on the screen and select the option "new" and "file geodatabase" (Fig. 1).
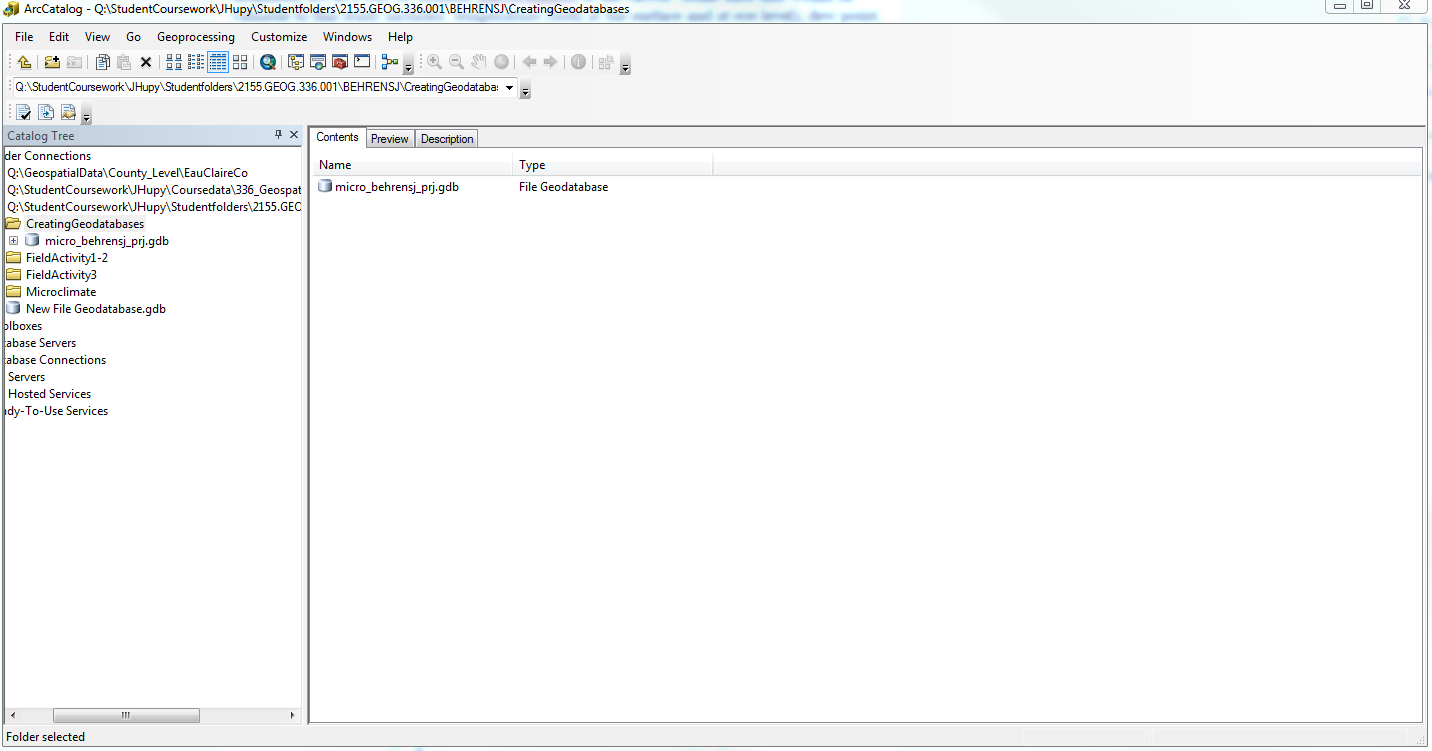 |
| (Fig. 1) This file geodatabase was created and named "micro_behrensj.gdb" since it will be where all the collected microclimate data from the field will be stored until it is analyzed and incorporated into the final microclimate map. |
Creating the domains in a geodatabase is very important to do correctly but can often be the most tricky part of geodatabase set up. Domains can be defined as rules that are applied to a field within a table which work to enforce the integrity of data by making it so that only the predetermined values for specific domains can entered. In this case to set the domains you right click on the geodatabase that you created and select the "properties" option. Then by selecting the "domains" tab you can set the domains and their ranges (Fig. 2).
 |
| (Fig. 2) Within the domains tab there are tables where the domain name, description, and other properties can be entered. There can be multiple different domains with different properties within the same geodatabase. This makes it so that you don't need to create as many feature classes but rather can organize your data within the geodatabase itself while collecting the data in the field. |
 |
| (Fig. 3) The range and field type of the domains are set separately for each of the domains to ensure that they are the best properties fit for the given data that will be collected in each domain. |
While I previously had always thought that creating a geodatabase was a simple and rather trivial task I learned through this activity that it can be very important and help to ensure more success in the field. Pre-planning a project using domains to organize data in geodatabases can minimize errors and speed up the process of actually collecting the data values while in the field. Domains are extremely useful in that they minimize the number of feature classes that are created because they can organize data in a way that does not require more than a single class. The creating of a geodatabase prior to field work is crucial and a rather simple way to stay organized.















